

計量級雷達液位計高精度測量技術
摘要:計量級高精度測量對雷達液位計的系統設計和處理方法等提出了諸多挑戰(zhàn), 調頻連續(xù)波雷達通過測量發(fā)射信號和回波信號的頻率差來測量距離, 能夠獲得較高的測量精度, 同時由于其易于實現, 是雷達液位計的主要體制之一。在介紹FMCW雷達液位計的系統原理基礎上, 對諸如晶振頻率、調頻斜率、工作環(huán)境等影響測量精度的因素進行了分析, 提出了相應的解決措施, 并開展了高精度頻譜估計技術研究。該項技術在實際的雷達液位計上得到了應用, 其測量精度滿足系統要求。
High Accuracy Measurement Technology of Metrological Radar Level Meter
XIE Jinhua GUO Mingming
AVIC Leihua Electronic Technology Research Institute
Abstract:
Metrological high accuracy measurement presents many challenges to the system design and processing of radar level meter.LFCW radar measures distance by estimating the difference frequency between the transmitted wave and echo, high precision measurement can be obtained.And also it is easy to implement, so it becomes one of the main systems of radar level meters.On the basis of introducing the system principle of radar level meter, the influences of the crystal-controlled frequency, the slope of frequency modulation, the speed of light, and the work environment on the measurement accuracy are analyzed, and the corresponding solutions are put forward.Finally, a method of high accuracy range measurement technology is presented.This technology has been applied to the practical radar level meter and the measurement accuracy meets the system requirement.
0、引言:
油庫儲油罐感知層由溫度、壓力、流量、液位等信息傳感器組成, 雷達液位計是儲油罐油量的非接觸式測量裝置, 采用發(fā)射—反射—接收的工作模式探測液位高度, 具有安全可靠、精度高、壽命長、適應各種工作環(huán)境的特點, 廣泛應用于石化、倉儲行業(yè), 是儲油罐的核心傳感器[1]。
雷達液位計的發(fā)展是從20世紀80年代開始的, 雷達液位計主要由調頻連續(xù)波 (FMCW) 雷達、脈沖雷達兩類[2], 一般工作在C, X, K波段。眾所周知, 雷達的測距精度主要取決于信號的帶寬和信噪比, 脈沖雷達液位計由于受脈沖寬度和高速計時器件的限制, 測量精度一般在3m~10mm, 主要用于過程控制, 為中低端雷達液位計。與脈沖雷達相比, FMCW雷達液位計通過測量發(fā)射和目標反射的FMCW信號的頻率差來測量距離, 可以形成大帶寬的FMCW信號且不受脈寬的限制, 因此能達到更高的測量精度和分辨率, 目前FMCW雷達液位計測量精度可達0.4m~3mm, 計量級精度則在±1mm以內, 主要用于計量級和商品交易, 為中高端應用場合使用[3]。
對于中遠程雷達來說, 其測距精度一般在米級水平, 諸如頻率精度、波形線性度、大氣溫度和壓力等因素對精度的影響微乎其微, 在設計時這些因素一般不予考慮。而在超近程高精度的雷達液位計中, 這些因素則是影響測距精度的主要方面。例如, 在雷達液位計中的100MHz晶振具有10-5的頻率精度, 經過上行鏈路 10倍頻到X或K波段, 則頻率精度變?yōu)?0-4, 在測量20m的目標時就有2mm的誤差。因此, 計量級高精度測量對雷達液位計的系統設計和處理方法上提出了諸多挑戰(zhàn)。本文從FMCW雷達液位計系統角度出發(fā), 針對這些因素對測距精度的影響進行了深入研究, 并提出了可行的技術手段。
1、系統原理和組成:
1.1、FMCW雷達測距原理:
線性調頻連續(xù)波 (FMCW) 雷達是一種通過對發(fā)射FMCW信號及相應的接收處理獲得距離與速度信息的雷達體制, 一方面發(fā)射信號通過天線向外輻射, 另一方面作為混頻器的基準信號解調回波信號, 其得到的差頻信號頻率與目標的距離成正比, 式 (1) 表示差頻信號頻率與目標的距離的關系。雷達波形及測距原理如圖1所示。
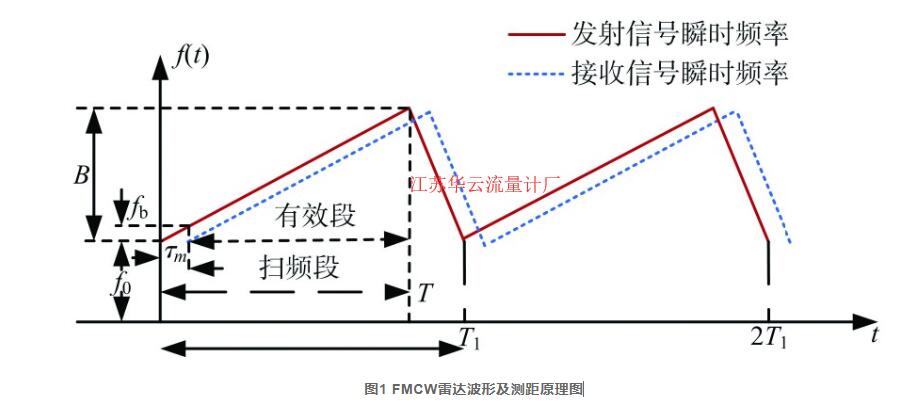

圖1 FMCW雷達波形及測距原理圖

式中, fb為差頻信號頻率, R為目標距離, B為調頻帶寬, T為調頻周期, c為光速。
1.2、FMCW雷達液位計組成:
FMCW雷達液位計由喇叭天線、收發(fā)模塊、電源模塊、信號處理模塊、顯示模塊等單元組成。收發(fā)模塊產生FMCW信號, 經環(huán)行器至喇叭天線向外輻射, 回波信號由喇叭天線接收經環(huán)行器送到接收通道, 接收通道對回波信號進行諧波混頻、放大、低通濾波后, 輸出包含距離信息的差頻信號, 經A/D采樣形成數字信號, 信號處理模塊接收收發(fā)模塊的差頻數字信號進行FFT、雜波抑制、目標檢測、頻譜估計等處理后, 得到高精度的液位數據, 通過現場總線送到顯示單元和上位機, 其原理框圖如圖2所示。
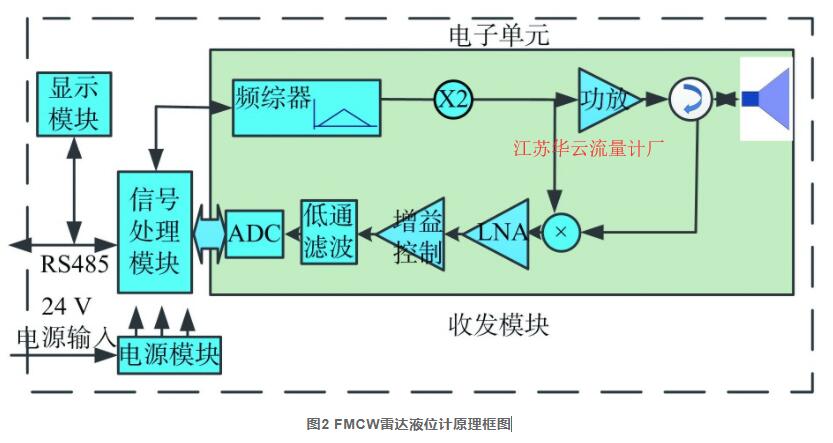
圖2 FMCW雷達液位計原理框圖
2、測距精度影響因素分析及相應的解決措施:
根據FMCW信號測距精度公式[4]:
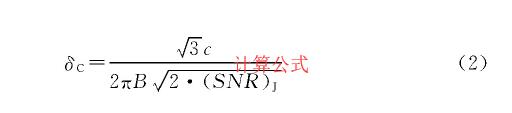
測距精度主要取決于信號帶寬和信噪比, 假定信號帶寬B為2GHz, 要達到1mm的精度, 則信噪比 (SNR) J=29dB, 式 (2) 為雷達測距精度的Cramer-Rao界, 因此在實際系統中信噪比應大于29dB。由此看出, 要滿足1mm的測距精度, 雷達液位計應具有大帶寬、高信噪比的特征。
在雷達液位計系統設計滿足測距精度情況下, 最終得到的距離精度還受其他因素影響, 由式 (1) 變換得

式中, K=B/T為調頻斜率。從式 (3) 可以看出, 差頻頻率、調頻斜率將會影響測距精度, 誤差表現形式為比例誤差, 下面對這些因素對測距精度的影響進行分析, 并提出相應的技術措施。
2.1、晶振頻率:
差頻頻率fb和帶寬B的誤差的主要來源于晶振頻率的誤差, 該誤差主要由中心頻率偏差和溫度變化引起的頻率偏差兩部分構成, 前者用頻率準確度表示, 后者用頻率溫度穩(wěn)定度表示。對于晶振中心頻率偏差, 可在雷達系統校正時進行比例修正, 盡量選擇頻率準確度較高的器件, 目前晶振的頻率準確度 (與晶振輸出頻率的比值) 一般在1×10-5以內;對于溫度變化引起的頻率偏差, 為了減小溫度變化的影響, 需選用恒溫晶振, 其溫度穩(wěn)定度指標可達1×10-9;考慮到價格因素, 也可采用價格便宜的溫補晶振, 其溫度穩(wěn)定度指標可達5×10-7, 可以滿足精度要求。
2.2、FMCW調頻斜率:
FMCW信號的調頻斜率的線性度指標直接關系到距離測量精度, 早期的FMCW雷達液位計大多采用VCO產生FMCW信號, 由于VCO是模擬電壓控制頻率產生, 易受模擬電壓非線性和溫度變化的影響, FMCW信號的線性度不高, 要采用復雜的校正控制電路和溫度補償電路。而數字直接頻率合成技術 (DDS) 采用數字方法產生頻率, 線性度極高且受溫度影響較小, 在雷達和通信系統中得到了廣泛的應用, 且芯片價格已下降到合理的水平。因此, 在設計中需采用DDS來產生FMCW信號, 以保證FMCW信號的線性度。
DDS具有良好的線性度, 其等效線性度在10-6以下, 根據線性度誤差的經驗公式[3]:

式中, L為線性度, R為目標距離, 設L=10-6, R=20m, 則δL=0.08mm。
采用DDS后, 其調頻線性度對測距精度基本沒有影響, 但DDS的量化誤差對測距精度有影響, 該影響也可通過系統校正進行比例修正。
2.3、 系統校正:
晶振頻率、調頻斜率等的誤差對測距精度有較大的影響, 其表現形式為比例誤差, 在系統設計時要進行定量分析, 其定量分析數據對系統調試有指導作用, 但最終需要通過測量系統來對雷達液位計進行精確的比例校正, 考慮到比例誤差的影響, 式 (3) 修正為

式中, g (fr, K) 為校正系數, 與晶振頻率、調頻斜率等的誤差有關。
雷達液位計測量系統主要由激光跟蹤儀、儲油罐模擬板、液位計支架 (液位計安裝車) 、監(jiān)控計算機等組成, 放置在滿足一定長度要求的暗室內, 其原理框圖如圖3所示。在該系統中, 激光跟蹤儀測量雷達液位計與目標板之間的距離, 并以此距離值為基準, 與雷達液位計測量的距離值進行比對來計量雷達液位計的精度, 通過設置多個測量點來進行比例校正, 具體方法如下:
1) 在量程范圍內均勻設置N個測量點;
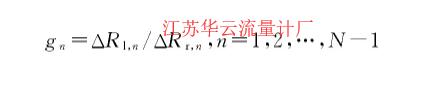
2) 記錄激光跟蹤儀的N點測量值Rl, n, n=1, 2, …, N, 計算N-1點距離差分值:

3) 記錄雷達液位計的N點測量值Rr, n, n=1, 2, …, N, 計算N-1點距離差分值:

4) 計算比例校正系數:
5) 計算比例校正系數的均值, 代入式 (5) , 完成比例校正。
由于雷達液位計內部的射頻電路和電纜在傳輸信號時有一定的延時, 因此雷達液位計基準面的距離值不等于零, 存在固定誤差, 該固定誤差可通過雷達液位計測量系統進行測量, 在系統計算時予以消除。
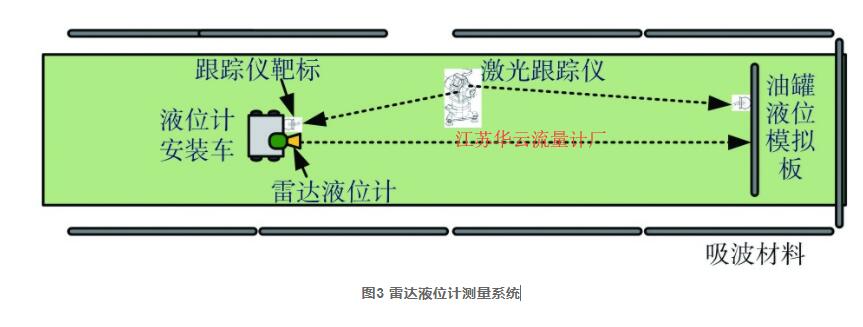
圖3 雷達液位計測量系統
3、高精度頻譜估計技術:
從前面的分析可知, 要達到1mm的測量精度, 雷達液位計需要具備大帶寬、高信噪比的特點。傳統測量方法通過數字化和FFT計算得到距離量化值, 但是FFT的分辨率是顯然不能滿足測量精度要求的。例如, 假定信號帶寬為2GHz, 則FFT的距離分辨率為75mm。這是因為檢測頻譜上的高點不一定是回波信號頻譜的 實際峰值, 直接采用FFT的離散頻譜點來計算距離會有較大的誤差。因此, 需要通過高精度頻譜估計來找到兩離散頻譜高點中間的峰值位置, 以得到高精度的距離測量值。
為了滿足高精度測量需求, 學者們提出了多種提高FMCW雷達距離測量精度的方法。例如:
1) 利用DFT頻譜相位信息實現高精度測距[5], 該方法運算量大, 對硬件要求高, 工程化實現難度較大;
2) 結合Chirp-Z變換, “由粗到細”逐步找到頻譜實際峰值的位置[6], 該方法的本質是通過增加采樣點的方式提高精度, 增加了運算量;
3) 找到頻譜主瓣內最大和次大譜線, 使用插值法求出中心頻率[7], 該方法原理簡單, 計算量小, 易于工程實現, 但其提高仿真精度的能力有限。
針對上述問題, 本文提出一種基于迭代插值的高精度譜估計算法, 該算法首先采用FFT粗測差頻信號的頻率, 然后在FFT峰值附近取兩條譜線進行頻率細化。其核心思想為:找到回波序列x (n) 的頻譜X (k) 幅度最大值A和次大值B, 及其所在的位置k1, k2;若A=B, 則目標真實位置所對應的頻率就在k1, k2的中心。其原理如圖4所示。
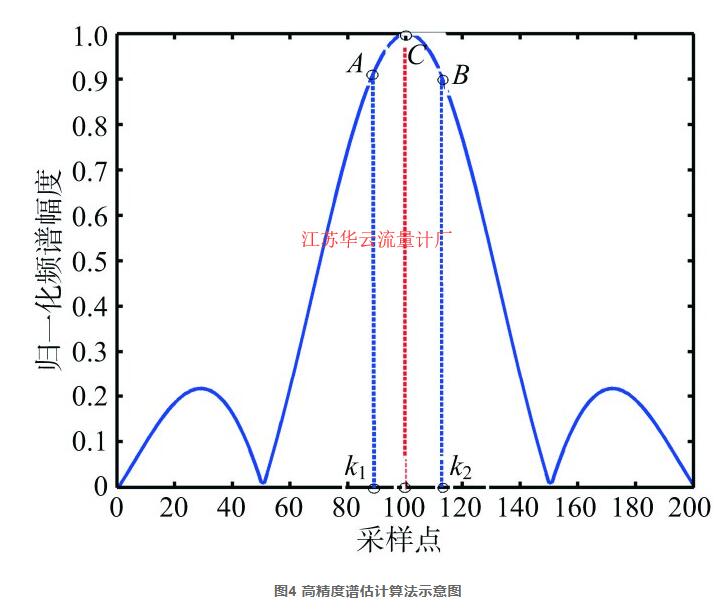
圖4 高精度譜估計算法示意圖
實現方法為:找到X (k) 幅度最大值所對應的位置k1, 選出k1左右兩點中幅度較大的那個點位置記為k2, 即k2=k1+1或k2=k1-1;根據這兩個分量, 利用式 (8) 計算出第一次迭代結果k1 (1) :
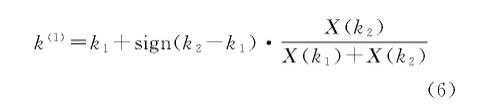
式中, 用上標來表示迭代序號。根據式 (8) 計算出的位置, 利用式 (9) 可以進一步確定一組新的

通過式 (10) 計算k1 (1) , k2 (1) 這兩點對應的頻率分量的幅度值, 分別為
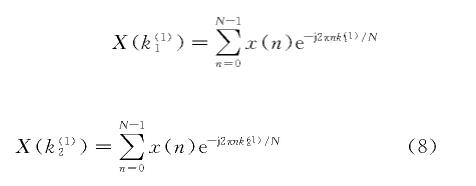
得到X (k1 (1) ) 和X (k2 (1) ) 之后, 繼續(xù)利用式 (8) 計算出k (2) , 按照同樣的步驟, 迭代3次, 最后得到k1 (4) , k2 (4) , 而最優(yōu)頻率分量對應的位置k*由式 (11) 計算得到:

這種方法測量精度高, 而且最大的優(yōu)點是運算量小, 單次測量只需進行6次DFT。
設定一組仿真參數:帶寬B=2GHz, 頻率調制時間T=5.12ms, 采樣率fs=200kHz, 信噪比SNR=29dB。使用上述算法進行仿真, 對20.8~21m以1mm采樣間隔得到的距離進行測試, 得到誤差統計結果, 如圖5所示。
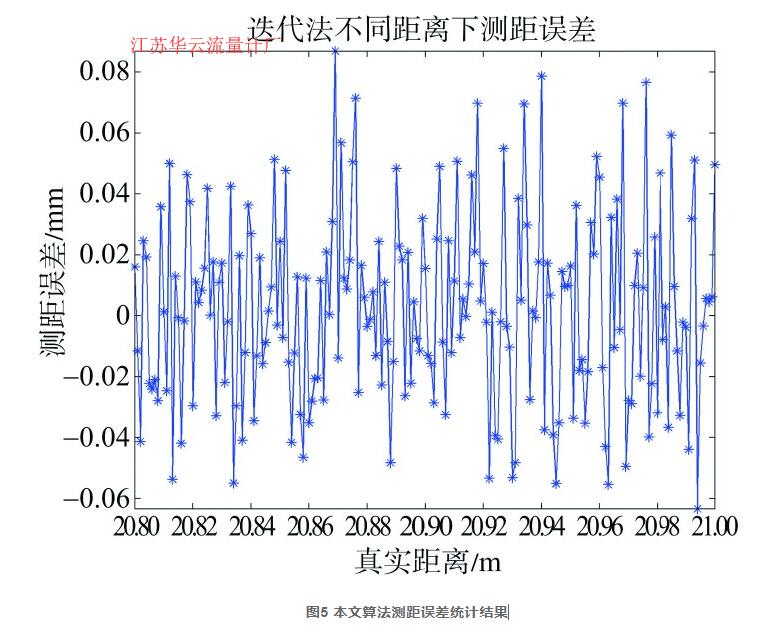
圖5 本文算法測距誤差統計結果
從圖5可知, 利用本文提出的基于迭代插值的高精度譜估計算法進行測距, 不同距離的測量誤差都控制在1mm以內。經統計, 誤差絕對值的最大值為0.153 2 mm, 誤差絕對值的最小值為2.987 8×10-5 mm;誤差均值為0.001 2mm, 標準差為0.045 8 mm;誤差絕對值的均值為0.036 4mm, 誤差絕對值的標準差為0.027 7mm;證明了該算法可以滿足高精度測距的要求。
4、結束語:
本文從FMCW雷達液位計系統設計角度出發(fā), 根據計量級測量精度的要求, 分析得出雷達液位計應具有大帶寬高信噪比的特點;在此基礎上, 對諸如晶振頻率、調頻斜率、工作環(huán)境等影響測量精度的因素進行了分析, 提出了相應的技術措施, 得到了其影響為比例誤差的結論;通過設計雷達液位計測量系統, 對比例誤差進行校正, 給出了具體的測試方法;最后研究了一種高精度頻譜估計算法。本文研究的FMCW雷達液位計高精度測量技術在實際的雷達液位計得到了應用, 并通過了1mm精度的國家計量認證, 驗證了該技術的有效性。
相關產品推薦:








